Pytorch卷积实现边缘检测
本文调用 pytorch 的卷积函数,实现两种边缘检测:
- 边缘检测(突出中间值)
- sobel(索贝尔) 边缘检测
对比这两种实现,sobel(索贝尔) 边缘检测 的检测效果看起来更清楚。
阅读前提:
- 了解深度学习卷积的概念
- 了解pytorch 的卷积函数、tensor数据类型
边缘检测(突出中间值)
卷积核:
[[-1, -1, -1],
[-1, 8, -1],
[-1, -1, -1]]
检测效果
第一个例子
输入:cat.jpg
/img/ch5/cat.jpg)
卷积参数: kernel_size=3, padding=1, stride=1,输出的图像与原图大小一致。
卷积效果:

第二个例子
原图

卷积参数: kernel_size=3, padding=1, stride=1,输出的图像与原图大小一致。
卷积结果(图片放大了):

卷积函数
卷积核:
[[-1, -1, -1],
[-1, 8, -1],
[-1, -1, -1]]
def nn_conv2d_2(im):
# 用nn.Conv2d定义卷积操作,padding=1, stride=1
conv_op = nn.Conv2d(1, 1, 3, bias=False, stride=1, padding=1)
# 定义卷积算子参数
kernel = np.array([[-1, -1, -1], [-1, 8, -1], [-1, -1, -1]], dtype='float32')
# 将卷积算子转换为适配卷积操作的卷积核
kernel = kernel.reshape((1, 1, 3, 3))
# 给卷积操作的卷积核赋值
conv_op.weight.data = torch.from_numpy(kernel)
# 对图像进行卷积操作, kernel_size=3, padding=1, stride=1,输出的图像与原图大小一致。
edge_detect = conv_op(im)
# 将输出转换为图片格式
return edge_detect
完整程序
import torch
import numpy as np
from torch import nn
from PIL import Image
import torch.nn.functional as F
import os
def functional_conv2d(im):
kernel = np.array([[-1, -1, -1], [-1, 8, -1], [-1, -1, -1]], dtype='float32')
kernel = kernel.reshape((1, 1, 3, 3))
weight = torch.from_numpy(kernel)
# 对图像进行卷积操作, kernel_size=3,padding=1, stride=1, 输出的图像与原图大小一致。
edge_detect = F.conv2d(im, weight, padding=1)
return edge_detect
def nn_conv2d_2(im):
# 用nn.Conv2d定义卷积操作,padding=1, stride=1
conv_op = nn.Conv2d(1, 1, 3, bias=False, stride=1, padding=1)
# 定义卷积算子参数
kernel = np.array([[-1, -1, -1], [-1, 8, -1], [-1, -1, -1]], dtype='float32')
# 将卷积算子转换为适配卷积操作的卷积核
kernel = kernel.reshape((1, 1, 3, 3))
# 给卷积操作的卷积核赋值
conv_op.weight.data = torch.from_numpy(kernel)
# 对图像进行卷积操作, kernel_size=3, padding=1, stride=1,输出的图像与原图大小一致。
edge_detect = conv_op(im)
# 将输出转换为图片格式
return edge_detect
def main():
# 把工作目录切换到当前文件夹所在目录
os.chdir(os.path.dirname(os.path.abspath(__file__)))
# 打印当前工作目录
print(os.getcwd())
# 读入一张图片,并转换为灰度图
im = Image.open('./cat.jpg').convert('L')
# 将图片数据转换为矩阵
im = np.array(im, dtype='float32')
# 将图片矩阵转换为pytorch tensor,并适配卷积输入的要求
im = torch.from_numpy(im.reshape((1, 1, im.shape[0], im.shape[1])))
print("im.shape: ", im.shape)
# 边缘检测操作
# edge_detect = nn_conv2d_2(im)
# 输出的图片与原图大小相同
edge_detect = functional_conv2d(im)
# 将输出限制在0-255之间
edge_detect = torch.clamp(edge_detect, min=0, max=255)
edge_detect = edge_detect.squeeze().detach().numpy()
print("edge_dect shape:", edge_detect.shape)
print("edge_dect: ", edge_detect)
# 将array数据转换为image
im_image = Image.fromarray(edge_detect)
# image数据转换为灰度模式
im_image = im_image.convert('L')
# 将Image数据转换为numpy array
im_L_numpy = np.array(im_image, dtype='uint8')
print("im_L_numpy.shape: ", im_L_numpy.shape)
print("im_L_numpy: ", im_L_numpy)
# 保存图片
im_image.save('edge_result.jpg', quality=95)
if __name__ == "__main__":
main()
检测竖直方向的轮廓
卷积核: 检查轮廓的效果不如上面的突出中间值的轮廓检测,因为该卷积核只会检测竖直方向的变化,而突出中间值的轮廓检测不会有这个问题。
[[1, 0, -1],
[2, 0, -2],
[1, 0, -1]]
检测效果
原图:
卷积参数: kernel_size=3, padding=0, stride=1,输出的图像与原图小2个像素。卷积效果:
与突出中间值结果差不多,但是如果垂直方向的的轮廓(垂直方向的像素值的差值)
可以看到有些水平的轮廓没有显示出来。比如图片中洗衣机的圆环的轮廓出现断裂。

检测竖直方向的卷积函数
def functional_conv2d_vertical(im):
"""使用F.Conv2d进行边缘检测, 检测竖直方向的轮廓
Args:
im (tensor): 输入的tensor图像
Returns:
tensor: 输出的tensor图像
"""
sobel_kernel = np.array([[1, 0, -1], [2, 0, -2], [1, 0, -1]], dtype='float32')
sobel_kernel = sobel_kernel.reshape((1, 1, 3, 3))
weight = torch.from_numpy(sobel_kernel)
edge_detect = F.conv2d(im, weight, padding=0)
# 将输出的tensor的数值都变为正数
edge_detect = torch.abs(edge_detect)
return edge_detect
上面这段函数有个关键点:
# 将输出的tensor的数值都变为正数
edge_detect = np.abs(edge_detect)
这是因为卷积核是有方向的,计算时,卷积核第一列是正数,第3列是负数,如果卷积时,第一列对应的原图数值很小,而第3列对应原图的数值很大,那么卷积核与原图元素的卷积结果是负数,但这种情况是一个轮廓点,所以需要将负数变为正数。不然后续转换为灰度图时,负数会变为0。这样就丢失了轮廓。 虽然这种方式可以解决负数的问题,不过水平的轮廓还是无法解决的,如果需要考虑水平轮廓可以采用sobel 算子。
sobel(索贝尔) 边缘检测
sobel 的实现思路就是使用两个算子,一个检测水平方向的算子,另一个是检测垂直方向的算子,然后将两个方向的边缘进行叠加:将水平方向与竖直方向的边缘检测结果进行平方、相加,再开方
完整程序再最后面。
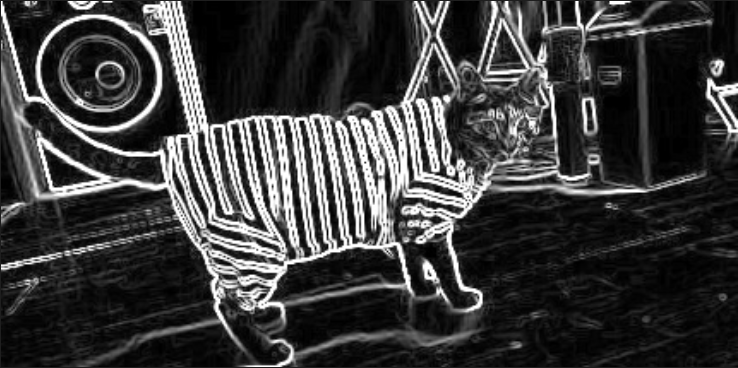
检测效果
原图:
效果还是不错的:
sobel(索贝尔) 卷积函数
检测竖直方向轮廓的卷积函数:
def functional_conv2d_vertical(im):
"""使用F.Conv2d进行边缘检测, 检测竖直方向的轮廓
Args:
im (tensor): 输入的tensor图像
Returns:
tensor: 输出的tensor图像
"""
sobel_kernel = np.array([[1, 0, -1], [2, 0, -2], [1, 0, -1]], dtype='float32')
sobel_kernel = sobel_kernel.reshape((1, 1, 3, 3))
weight = torch.from_numpy(sobel_kernel)
edge_detect = F.conv2d(im, weight, padding=0)
# 将输出的tensor的数值都变为正数
edge_detect = torch.abs(edge_detect)
return edge_detect
卷积核:
[[1, 0, -1],
[2, 0, -2],
[1, 0, -1]]
检查轮廓的效果不如上面的突出中间值的轮廓检测,因为该卷积核只会检测竖直方向的变化,而突出中间值的轮廓检测不会有这个问题。
检测水平方向轮廓的卷积函数:
def functional_conv2d_horizontal(im):
"""使用F.Conv2d进行边缘检测, 检测水平方向的轮廓
Args:
im (tensor): 输入的tensor图像
Returns:
tensor: 输出的tensor图像
"""
sobel_kernel = np.array([[1, 2, 1], [0, 0, 0], [-1, -2, -1]], dtype='float32')
sobel_kernel = sobel_kernel.reshape((1, 1, 3, 3))
weight = torch.from_numpy(sobel_kernel)
edge_detect = F.conv2d(im, weight, padding=0)
# 将输出的tensor的数值都变为正数
edge_detect = torch.abs(edge_detect)
return edge_detect
检测水平方向卷积核:
[[1, 2, 1],
[0, 0, 0],
[-1,-2,-1]]
完整程序
import torch
import numpy as np
from torch import nn
from PIL import Image
import torch.nn.functional as F
import os
def functional_conv2d_vertical(im):
"""使用F.Conv2d进行边缘检测, 检测竖直方向的轮廓
Args:
im (tensor): 输入的tensor图像
Returns:
tensor: 输出的tensor图像
"""
sobel_kernel = np.array([[1, 0, -1], [2, 0, -2], [1, 0, -1]], dtype='float32')
sobel_kernel = sobel_kernel.reshape((1, 1, 3, 3))
weight = torch.from_numpy(sobel_kernel)
edge_detect = F.conv2d(im, weight, padding=0)
# 将输出的tensor的数值都变为正数
edge_detect = torch.abs(edge_detect)
return edge_detect
def functional_conv2d_horizontal(im):
"""使用F.Conv2d进行边缘检测, 检测水平方向的轮廓
Args:
im (tensor): 输入的tensor图像
Returns:
tensor: 输出的tensor图像
"""
sobel_kernel = np.array([[1, 2, 1], [0, 0, 0], [-1, -2, -1]], dtype='float32')
sobel_kernel = sobel_kernel.reshape((1, 1, 3, 3))
weight = torch.from_numpy(sobel_kernel)
edge_detect = F.conv2d(im, weight, padding=0)
# 将输出的tensor的数值都变为正数
edge_detect = torch.abs(edge_detect)
return edge_detect
def main():
# 把工作目录切换到当前文件夹所在目录
os.chdir(os.path.dirname(os.path.abspath(__file__)))
# 打印当前工作目录
print(os.getcwd())
# 读入一张图片,并转换为灰度图
im = Image.open('./cat.jpg').convert('L')
# 将图片数据转换为矩阵
im = np.array(im, dtype='float32')
# 将图片矩阵转换为pytorch tensor,并适配卷积输入的要求
im = torch.from_numpy(im.reshape((1, 1, im.shape[0], im.shape[1])))
print("im.shape: ", im.shape)
# 使用nn.Conv2d进行边缘检测
edge_detect_h = functional_conv2d_horizontal(im)
edge_detect_h = torch.clamp(edge_detect_h, min=0, max=255)
dege_detect_v = functional_conv2d_vertical(im)
dege_detect_v = torch.clamp(dege_detect_v, min=0, max=255)
# 将水平方向与竖直方向的边缘检测结果进行平方、相加,再开方
edge_detect = torch.sqrt(edge_detect_h**2 + dege_detect_v**2)
# 将输出限制在0-255之间
edge_detect = torch.clamp(edge_detect, min=0, max=255)
edge_detect = edge_detect.squeeze().detach().numpy()
print("edge_dect shape:", edge_detect.shape)
print("edge_dect: ", edge_detect)
# 将array数据转换为image
im_image = Image.fromarray(edge_detect)
# image数据转换为灰度模式
im_image = im_image.convert('L')
# 将Image数据转换为numpy array
im_L_numpy = np.array(im_image, dtype='uint8')
print("im_L_numpy.shape: ", im_L_numpy.shape)
print("im_L_numpy: ", im_L_numpy)
# 保存图片
im_image.save('edge_result.jpg', quality=95)
if __name__ == "__main__":
main()
数值裁剪到0-255
注意这个函数:
edge_detect_h = torch.clamp(edge_detect_h, min=0, max=255)
它的目的:
torch.clamp 是 PyTorch 中的一个函数,它的作用是将输入张量中的每个元素限制在指定范围内,并返回一个新的张量。具体来说,torch.clamp(input, min, max) 函数将输入张量 input 中的每个元素限制在 [min, max] 的范围内,如果元素小于 min,则将其设置为 min;如果元素大于 max,则将其设置为 max;否则保持不变。
例如,如果有一个张量 x = torch.tensor([1, 2, 3, 4, 5]),我们可以使用 torch.clamp(x, 2, 4) 将其限制在 [2, 4] 的范围内,得到一个新的张量 torch.tensor([2, 2, 3, 4, 4])。
简单来说:它可以将小于0的数值变为0,大于255的数值变为255。 之前考虑过下面的操作:
edge_detect = edge_detect * 255.0 / edge_detect.max()
但是这种将数值拉到区间[0, 255], 容易受到一些很大值的干扰,这样最后的图片整体亮度偏低。
之前还考虑过使用直方图均衡化,来调节对比度,但是这样会凸显一些之前不明显的轮廓,这不符我的原意。最后使用torch.clamp效果就挺好了。